0

与复杂且昂贵的分立设计方案相比,ADIS16480为精确的多轴惯性检测与工业系统的集成提供了简单而高效的方法。所有必需的运动测试及校准都是工厂生产过程的一部分,大大缩短了系统集成时间。严格的正交对准可简化导航系统中的惯性坐标系对准。SPI和寄存器结构针对数据收集和配置控制提供简单的接口。
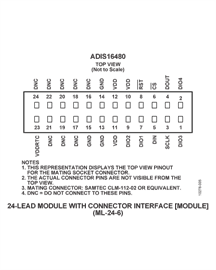
ADIS16480的尺寸和连接器系统与ADIS16488相同,可大大简化升级过程。它采用约为47 mm x 44 mm x 14 mm的模块封装,配有标准连接器接口。工作温度范围为-40°C至+85°C。
应用
- 平台稳定、控制和指向
- 导航
- 仪器仪表
- 机器人
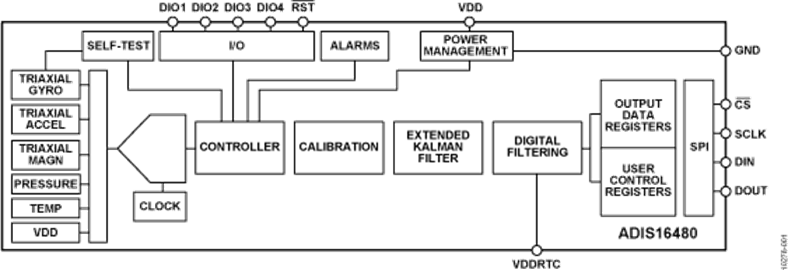
(NASDAQ: ADI)今天推出一款10自由度(DoF) MEMS惯性测量单元(IMU) ADIS16480,其中采用一种嵌入式传感器融合算法,可以为平台稳定、导航和仪器仪表应用提供高度精确的方向检测能力ADIS16480 10-DoF MEMS IMU是ADI iSensor MEMS
ADIS16480采用一种扩展式卡尔曼滤波器(EKF),可以持续融合传感器输入以提供高度精确的定位信息,同时与其他MEMS IMU相比,还能缩短设计时间、降低成本。