电子元器件产业互联网平台
电子元器件产业互联网平台


一站式电子元器件采购平台

元器件移动商城,随时随地采购

半导体行业观察第一站!

专注电子产业链,
坚持深度原创

电子元器件原材料采购
信息平台
摘要: 本文深刻剖析了自动驾驶摄像头、雷达、激光雷达三大传感器的未来趋势,主要根据他们主要特点、优劣势和技术的发展现状进行详细的描述。
要想在2021/2022的年度车型上实现SAE L4/L5的全自动驾驶功能,就需要应用多种传感器冗余系统。当今的半自动驾驶系统采用了各种各样数量和设计的雷达和摄像头系统。
而高性能价格合理、能检测300米半径内信息的激光探测与测距系统开发,还处在预研阶段。大多数汽车制造商都认为,如果要实现全自动驾驶,雷达,摄像头和激光雷达这三大传感器系统缺一不可。
到底是什么自动驾驶?
如果一辆车配备了巡航和限速功能,这算是自动驾驶吗?当然不算,但如果加上自动距离保持和自适应巡航控制(ACC AdapTIve Cruise Control)、并且司机可以在某些情况下短暂地将控制权交给车子本身呢?
对于自动驾驶的不同类别划分已经在以下表一中列出了。这一分类在美国是基于国际工程与汽车工业协会SAE3016标准列出的,在欧洲则是联邦高速公路研究所制定的。具体可以参考车云菌以往的文章(一篇文章读懂NHTSA自动驾驶分级),这里不做赘述。
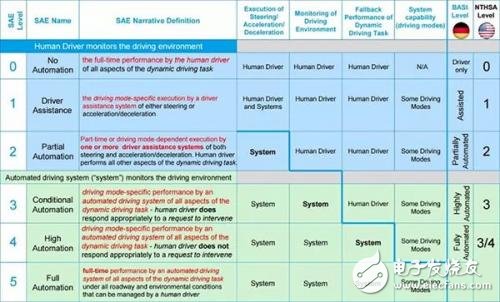
自动驾驶分级
到目前为止,没有汽车制造商能在量产的汽车中实现L3或更高等级的自动驾驶功能,但也有一部分已经生产出了样车。有些国家正在制定法律,以准入一些预计2020/2021上市的SAE L3自动驾驶汽车。
要实现L1-L5自动驾驶分别需要什么样的传感器?如上文所说,目前有基于摄像头/雷达/激光雷达的三种传感器系统。尽管停车所需的超声波传感器目前已被广泛应用,但它们对自动驾驶来说没什么作用。摄像头和雷达系统如今都已经配备在了自动驾驶L1和L2的汽车上,它们也是是实现更高等级自动驾驶的先决条件。
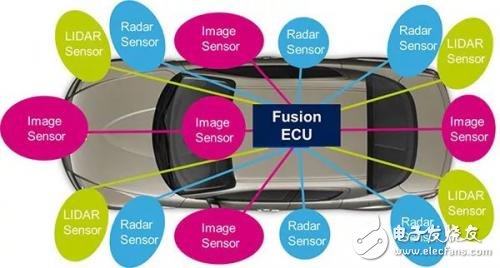
图1:汽车中使用的不同传感器
如今的摄像头系统采用CMOS图像传感器(complementroy meta-odix sensor互补金属氧化物半导体,一种大规模集成电路制造工艺和技术),能达到100-200万像素的高清传感器。单\双目摄像头和雷达系统融合,能为驾车人提供障碍物或者移动物体的速度、距离和外观形状等信息。
近程(工作在24 GHz)或远程(工作在77GHz)雷达传感器一般装在车身的前部和后部,用来确定车身前后的交通状况,它们能监控从距离1厘米到数百米间的状况。目前,激光探测系统很少被用于汽车量产中,这一技术的巨大潜能还有待继续开发,但首先需要解决成本和满足车规标准的问题。
摄像头 后视和360度摄像头
视频影像能给人类司机提供很多驾车信息,同时也能作为输入信息被用于高度自动驾驶汽车。后视和360度摄像头能让司机更好地了解车子周围的环境状况。如今,2D摄像头在显示图像和加载更多辅助信息(如轮胎转向角度等)方面非常常用。高端品牌车商更开始在车上加装带有3D影像显示功能的摄像头了。
为了让3D显示更加真实,通常需要4-6个摄像头联合输入信号。而且在“图像拼接”过程中需要格外注意,以防损失任何图像信息或者产生重影。
不论2D还是3D摄像头都需要图像传感器有至少130dB的高动态范围(动态范围指一个多媒体硬盘播放器输出图像的最亮和最暗部分之间的相对比值)。只有这么高的动态范围才能保证,即使阳光直射到镜头上,传感器也能得到清晰的图像信息。
目前市场上最好的图像传感器动态范围达到145dB,通过24位的接口与图像信号处理器(ISP Image Signal Processor)相连。普通的镜头系统动态范围远远低于这个值。
另一个关键品质特征则是图像传感器的光线强度。目前,市场上最好的传感器信噪比(SNR Signal to Noise RaTIo输出信号同时输出的噪声信号的比值)能达到1比1mlx(毫勒克斯),每秒显示帧数达到30帧。
当前,汽车后视和360度摄像头系统通常采用中央集中架构。也就是说,一个中央控制模块统一处理4到6个摄像头的原始数据。而由于这种数据处理是通过软件完成的,就对处理器提出了很高的要求。
因为需要更多的FPGA(Field-Programmable Gate Array,即现场可编程门阵列,一种可编程半定制集成电路,可以更快更好地实现集成电路设计功能)来加快硬件处理的速度,在系统中造成了很高的能量损失。最新的数据压缩方法也需要大量的存储空间。
以下图片展示了另一种方法,该方法将图像处理过程分散在各个摄像头上,再将处理后的数据通过Ethernet(局域以太网)传送给汽车车机主机(包含主显示屏控制功能的电子控制模块),从而完成图像的收集和显示。
单个的图像信息在摄像头内处理,再通过以太网接口和短延时视频编码器H264被送到音响主机的主处理器中。图2展示的是未来车载摄像头系统从模拟信号向数字信号发展的过程。
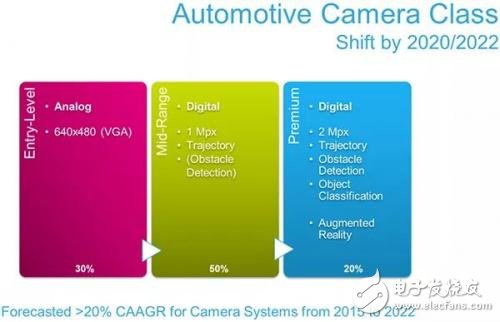
图2:未来车载摄像头系统从模拟信号向数字信号的发展
到2020年,大多数摄像系统都将是以数字信号为基础的。现有的数字摄像系统将获得的原始数据处理后送到显示模块进行图像显示。图3则展示了这一过程。
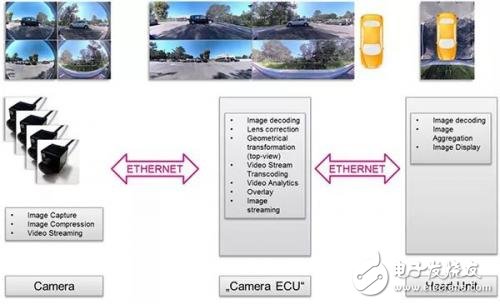
图3:中央集中式图像处理
非中央集中化的方式完全去掉了摄像头控制模块(ECU),只留下了智能摄像头和车机主机。说得更直白一点,这一方法在摄像头和中央摄像头控制模块中各有一个处理步骤,图4列出了相关细节。
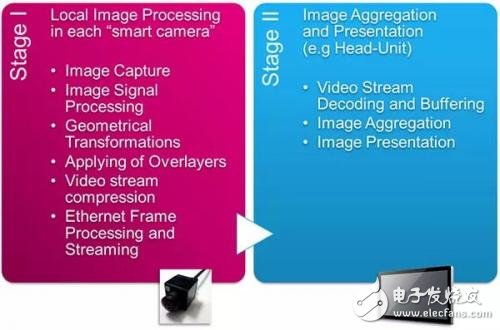
图4:两阶段系统路径
第一阶段(在数码摄像头内部),处理图像信息,完成在视觉效果方面的转换,如鱼眼和滤镜,图像压缩以及以太网处理和传送也在这里完成。第二阶段(在中央摄像头模块里),完成视频解码、中间存储和将图像显示在屏幕上的过程。
这一方法使后视摄像头能够压缩信息并通过以太网传输到车机主机上。图5显示了一个此类高度集成化的数码后视摄像头的技术细节。
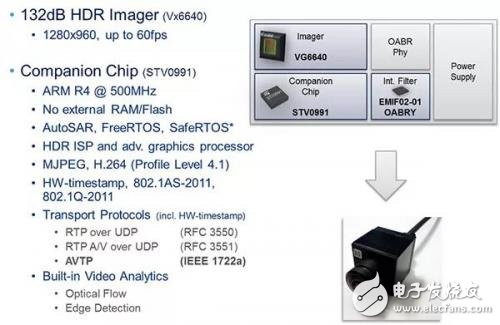
图5:高度集成化的车用后视摄像头
数码摄像头还有一种应用,是将4个摄像头的视频信号融合成一个360度无死角观察视线,如图6所示。
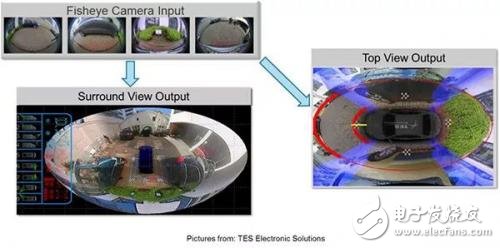
图6:360环视
前视摄像头系统
这一类系统常常用于距离中等或更远的场合,如在90米到250米的距离上。这些摄像头采用算法来自动检测物体、给它们分类并判断出距离它们的远近。例如,摄像头能判别行人和骑自行车的人、摩托车、路边黄线、桥梁桥墩和马路牙子。这类算法也被用在探测交通标识和信号上。
中程摄像头往往会就十字路口的情况、行人、前车紧急刹车、探测到的车道和信号灯情况给司机以警告。长程摄像头则被用于辨识交通标志、基于视频信息控制车距和道路导航 。
在这些摄像头系统中,因为只有直接来源于图像传感器的原始数据会被用到,所以不怎么需要对颜色进行准确地复原。通常,系统会采用带有RCCC矩阵(Red Clear Clear Clear, 指一个像素带有一个红光和三个无色滤镜)的颜色滤镜,从而在大多数图像传感器中得到比RGB(Red Green Blue, 红绿蓝)滤镜更高的光线强度(从而图像也才更清晰)。
中程和远程摄像头之间最主要的区别就是镜头的孔径角度,也叫FoV(Field of View视场)。中程镜头的水平视界(与水平线的夹角)约为70度到120度,而孔径角度更广的摄像头的水平视界通常为35度。
未来的系统会将中程和远程图像的内容通过光学系统集成起来,届时,摄像头的图像传感器将超过700万像素。
了解更多相关设计技术信息,请点击华强旗舰电子圈(http://www.hqbuy.com/dzq/dzqsy.html)!

社群二维码

关注“华强商城“微信公众号
Copyright 2010-2023 hqbuy.com,Inc.All right reserved. 服务热线:400-830-6691 粤ICP备05106676号 经营许可证:粤B2-20210308