电子元器件产业互联网平台
电子元器件产业互联网平台


一站式电子元器件采购平台

元器件移动商城,随时随地采购

半导体行业观察第一站!

专注电子产业链,
坚持深度原创

电子元器件原材料采购
信息平台
摘要: 本文将为大家介绍一下超级电容器的实例应用:之微网建模、联网运行控制及运行方式。首先我们简单介绍一下定义:在一种分布式电源与负荷单独构成小型电力系统的运行方式中,微型电网(微网)是指分布式电源与负荷构成的小系统,在外部故障时,微网与主网解列,这种运行方式称为孤岛运行。
本文将为大家介绍一下超级电容器的实例应用:之微网建模、联网运行控制及运行方式。首先我们简单介绍一下定义:在一种分布式电源与负荷单独构成小型电力系统的运行方式中,微型电网(微网)是指分布式电源与负荷构成的小系统,在外部故障时,微网与主网解列,这种运行方式称为孤岛运行。
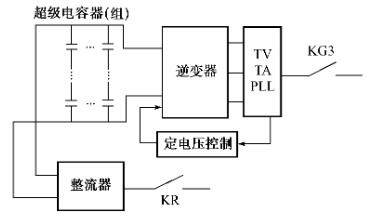
本文在MATLAB软件中的Simulink环境下建立模型,系统简化模型见图1。当KA闭合时。微网处于联网运行状态;当微网外部故障时,KA打开。微网进入孤岛运行。
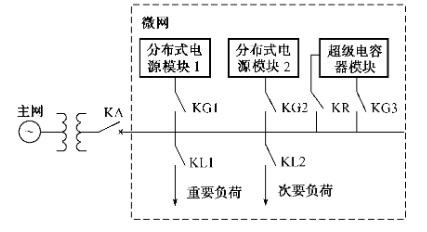
系统简化模型
元件参数说明如下:
(l)主网。电压等级30kV﹐短路容量100MVA,X/R=7。
(2)变压器。额定容量100kVA,dl1,Yn接法,电压比30kV/400V,R=0.97Ω,x=35Ω。
(3)重要负荷。1台异步鼠笼式电动机,额定状态运行时P=39.7kW,Q=38.8kvar,最大负载转知矩238N.m,额定转速1480r/min,其他参数为MATLAB提供的典型参数:电阻性负荷10kW,电机负荷占总负荷比例为78.7%。
(4)次要负荷。1台异步鼠笼式电动机,额定状态运行时P=l6.6kW,Q=13.6kvar.最大负载转矩98N.m,额定转速1460r/min,其他参数为MATLAB提供的典型参数;电阻性负荷6.5kW,电机负荷占总负荷比例为70%。
(5)分布式电源模块。现有的分布式电源有光伏电池、燃料电池、风力发电机。微型燃气轮机等,机端电压或为直流电压,或为高频电压,不能直接接于电网;而要经过逆变器或者整流器+逆变器等功率变换器件,使电压幅值频率和相位与电网相匹配后再并入电网。同时可利用功率变换器件的可控性来实现不同的控制方式,分布式电源模块简化图见图2。微网中分布式电源模块的控制方式主要有2种:定功率控制和定电压控制,在定功率控制方式下,分布式电源向系统注入预定数值的有功和无功功率。原理图见图3;在定电压控制方式下,逆变器利用反馈电压以调节交流侧电压来保证电压的稳定,原理图见图4。以下各图中,TV为电压互感器,TA为电流互感器,PLL为锁相环。
分布式电源采用标准同步发电机模型,额定功率35kVA,额定电压600V,电压频率100Hz。
(6)超级电容器模块。超级电容器(组)可以通过整流器从电网吸收能量,也可经由逆变器向电网注入功率。超级电容器模块简化图见图5。微网联网运行时,KR闭合,KG3打开,系统向电容器充电;在KA打开。进入孤岛运行的同时,KG3闭合﹐KR打开。超级电容器以定电压控制方式短时维持所有负荷正常运行,控制原理见图4。
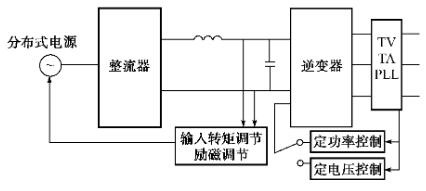
分布式电源模块
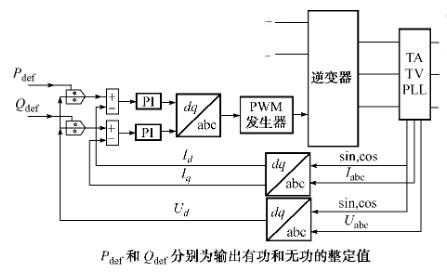
恒定输出功率控制原理
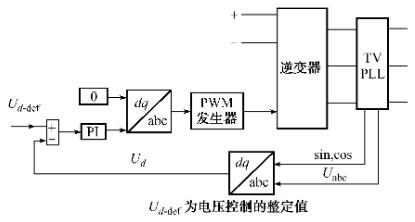
恒定电压控制原理
超级电容器模块
当图1中的开关KA闭合时。微网即处于联网运行状态,系统的电压和频率由主网进行调节,分布式电源模块在定功率控制模式下。向系统恒定输出有功功率28kW,无功功率20kvar,即设定Pdef=28kW,Qdef= 20kvar,且在不超过发电机额定容量的前提下,有功功率和无功功率的数值可以任意调节。联网运行仿真中,KA保持闭合,0.5s时KGl和KG2闭合,即分布式电源模块并入电网。仿真结果见图6。可以看出,电机的启动和分布式电源的并网都对电网造成了扰动,前者在0.5s内达到稳定,后者在0.2s内达到稳定。稳定后分布电源模块按设定值向系统注入有功功率和无功功率,主网输出功率随之降低,系统电压无明显波动。
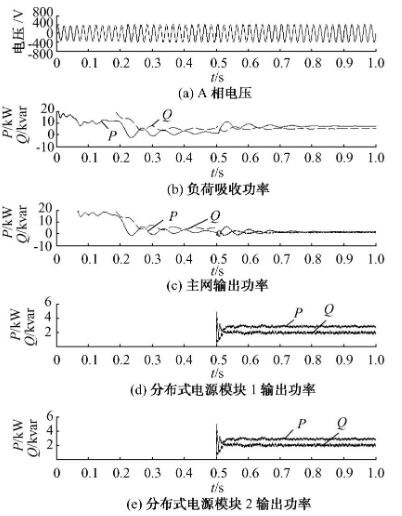
联网运行仿真结果
1微网孤岛运行控制
开关KA因左侧的主网发生故障而跳开时,微网即进入孤岛运行。孤岛运行的控制流程见图7。
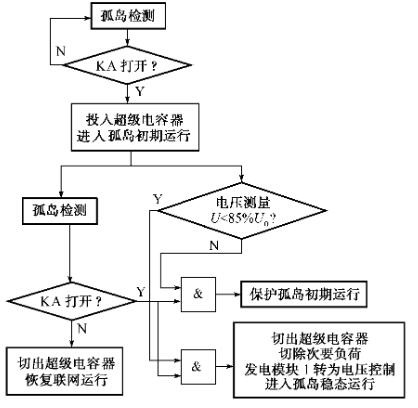
孤岛运行控制流程
孤岛检测装置检测开关KA的状态,KA打开为”Y”闭合为"N”。孤岛初期运行状态的定义为:孤岛运行中。所有分布式电源模块以定功率控制。超级电容器以定电压控制,且不切除任何负荷的运行状态。孤岛初期运行发生在由联网进入孤岛后的2s左右,其有2种结束方式:一是外部故障恢复,KA重新闭合,微网恢复联网运行,分布电源模块控制方式不变,超级电容器由向系统注入能量转为吸收能量,为下一次孤岛运行做准备;二是当超级电容器的能量将消耗殆尽,但微网仍未与主网重合时,则切出超级电容器,切除次要负荷,分布式电源模块1转为定电压控制,此时的运行状态定义为:孤岛稳态运行状态。因为微网的电压会随着超级电容器能量的消耗而逐渐降低,所以使用电压测量模块来决定微网从孤岛初期运行转入稳态运行的时机。但为了充分利用超级电容器,并尽可能长时间地保持住所有负荷来等待与主网重合,且考虑到低压运行的时间并不太长,本文提出将电压偏差限定改为+15%。
2超级电容器参数选择
由于超级电容器单体电压低,模块化的也不超过100V,所以仿真中使用多个超级电容器串。并联来提高直流电压和电容值,根据前述负荷以及分布式电源模块参数,要在孤岛运行初期保持所有负荷正常运行,超级电容器模块输出视在功率Sc=16.4kVA。
低压电网中,保护动作时时间为0~2.5s,加上重合闸的时间,取孤岛初期运行时间为1.5s,在此期间超级电容器模块输出功率为Sc,输出总的能量Wc至少为:

三相桥式电压型逆变电路输出三相线电压基波幅值U=0.78Uc(Uc为超级电容器电压),本文中低压电网电压为400V,那么只有在Uc=≥512.8V时超级电容器才能向微网供电,否则就会从微网吸收能量,所以在超级电容器放电1.5s后电压仍要求在512V之上。超级电容器的电容C取0.2F,电容能量计算公式为:

式中:UC为电容器初始电压,UT为放电后的电压;如前所述,UT要高于512.8V,则可算得:

考虑一定裕量,取UC为800V。
1瞬时故障仿真
本节对主网发生的瞬时故障时,有超级电容器和无超级电容器的情况进行仿真分析,分布式电源模块在0.5s并入主网,均以定功率控制,ls时刻KA因为主网故障而跳开,经过1.5s后KA重合,故障过程中分布式电源模块控制方式不变。仿真波形见图8图9。
瞬时故障仿真结果(无超级电容器)
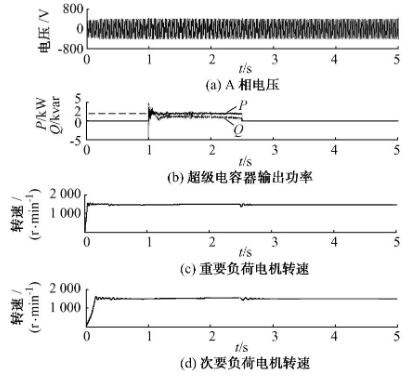
瞬时故障仿真结果(有超级电容器)
由图可见,由于微网总发电功率小于负荷需求,当没有超级电容器时微网进入孤岛运行后,系统电压在0.2s内迅速降至额定电压的75%,重要负荷电机和次要负荷电机转速分别降至89%和88%额定转速。为了保证重要负荷正常运行,则必须在进入孤岛运行的同时切掉次要负荷,并将分布式电源模块1的控制方式转为定电压控制,即提前进入微网稳态运行。由于仅过1.5s左右微网将与主网重合·所以因瞬时故障而切除次要负荷,从供电稳定性和经济性的角度来看都是不合适的。
有超级电容器时,微网进入孤岛运行时即投入超级电容器,并以定电压控制方式填补功率缺额,保持电压稳定。分布式电源模块保持定功率控制方式不变。从图9可以看出,由于超级电容器的存在微网进入孤岛时电压仅在前5个周期大于额定值,第3个周期幅值最大,为额定电压的104%,之后恢复为额定值;电动机的最大转速下降了50r/min,在0.1s后恢复正常转速。2.5s时KA闭合结束孤岛初期运行超级电容器停止对微网的控制转而通过整流器吸收能量,直至达到额定电压;由于电压的扰动,电动机的转速发生衰减振荡并在0.5s内结束,最大振幅为80r/min。
2永久故障仿真
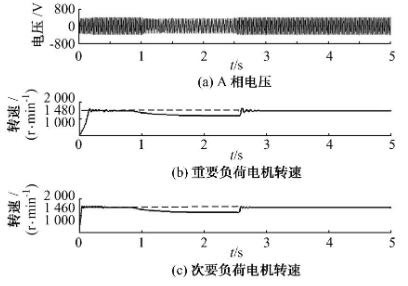
发生永久故障后,若无超级电容器。则所有负荷均不能正常运行,而且电压下降过大时电机转速将逐渐降低而最终堵转,只能通过切负荷进入孤岛稳态运行。有超级电容器时,系统控制方式与发生瞬时故障时相同,即微网进入初期运行。为了最大限度地维持所有负荷:等待重合到主网。本文且将电压偏差限定改为±l5%,当电压检测模块检测到系统电压低于额定电压的85%时。再切除次要负荷和超级电容器,分布式电源模块1改为定电压控制,进入稳态运行,仿真结果见图10。
如图10所示,在约3.6s时,系统电压降为额定电压的85%,因此,控制环节在此切除次要负荷电机和超级电容器,此后系统电压恢复到额定值,重要负荷电机恢复正常运行,由于设定电压最大偏差为15%%,从而造成了重要电机负荷转速最低降到600r/min,在实际中还应根据电机转速偏差指标来定义最大电压偏差。
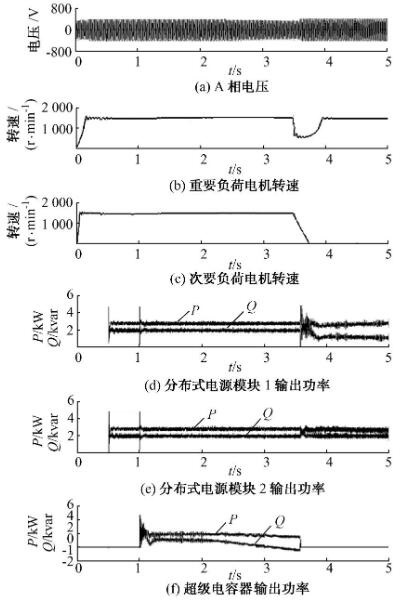
永久故障仿真结果(有超级电容器)

社群二维码

关注“华强商城“微信公众号
Copyright 2010-2023 hqbuy.com,Inc.All right reserved. 服务热线:400-830-6691 粤ICP备05106676号 经营许可证:粤B2-20210308